Grippers impresos en 3D
La impresión 3D y en general la manufactura aditiva está cobrando cada vez más importancia en el sector industrial. No se trata solo de una tendencia para entusiastas. Las tecnologías que permiten la fabricación de piezas con máquinas miles de veces más baratas que los centros de maquinado convencionales, nos permiten crear piezas en nuestros hogares.
Conforme la tecnología de materiales ha avanzado, la industria ha visto un área de oportunidad. Procesos de manufactura energéticamente menos demandantes, costos bajos y piezas funcionales. Pero sobretodo una disponibilidad prácticamente inmediata. Es importante destacar este hecho, porque los materiales han sido un impedimento para que las técnicas de impresión 3D lleguen a las plantas industriales. Esto debido a la fragilidad de las piezas. Sin embargo, hoy en día se pueden obtener piezas funcionales comparables con piezas fabricadas por inyección o polimerización.
Robots y grippers
Los grippers son elementos de sujeción que se utilizan como efector final en los robots. Aunque los grippers pueden tener distintas formas, tamaños y funciones, su objetivo es siempre el mismo: la sujeción mecánica. Por tanto, los elementos de sujeción que utilizan vacío o campos magnéticos, por lo general no son llamados grippers. Aunque no es una regla.
Los grippers pueden ser tan sencillos como unas pinzas de perfiles cuadrados o tan complejos como una serie de pinzas con perfiles de radios específicos. En algunos casos pueden estar fabricados de materiales flexibles.
La variedad de formas de grippers es tan amplia como la variedad de aplicaciones que pueden tener. Es por ello que incluso los fabricantes más especializados en el área no siempre logran cubrir las necesidades de sus clientes.
Es ahí donde entra la Impresión 3D. Gracias a la Impresión 3D una idea puede ser materializada y puesta en operación en sitio en un solo día. Algo casi imposible para la mayoría de fabricantes de grippers.
Por lo regular se utiliza como base los elementos neumáticos y de fijación a la muñeca del robot. Es decir, los elementos que permiten la acción de apertura y cierre del gripper.
Sin embargo, el final del gripper, la parte que tendrá contacto con el material es reemplazada por una pieza impresa en 3D. De manera que un mismo módulo neumático que funciona como efector final puede servir para tomar diversos objetos. Solo se necesita sustituir la pieza que tiene contacto con el material.
Prototipos de Grippers
Hay casos, en los que el objetivo no es sujetar un objeto. Casos en los que lo importante son las dimensiones. Por ejemplo, cuando se está probando la programación de un robot y resulta peligroso usar el gripper real. En esa situación, puede imprimirse un prototipo, o varios, con las dimensiones del gripper real. De manera que se puedan realizar las pruebas de manera segura y barata. En lugar de dañar grippers que cuestan miles de dólares, solo reciben daño piezas de entre 10 y 100 dólares. Y en tanto que son de plástico, tampoco hay posibilidad de que el robot sufra daños en caso de colisión.

También puede ser el caso de la programación del gripper en sí. En la interfaz que se utiliza para programar a los robots es necesario dar de alta la nueva herramienta y decirle las dimensiones. En ocasiones todavía no se cuenta con el gripper final o se desea comprobar una rutina del robot con la nueva herramienta agregada y es necesario usar un sustituto. Una pieza fabricada por impresión 3D. Si esto no fuera posible, entonces habría que esperar a tener el gripper final. Y eso podría tomar varias semanas.
Cuando se realizan demostraciones o se requiere resaltar la sección del gripper que interactua con el material, la impresión 3D es perfecta. Por ejemplo, si se tiene un robot con grippers desgastados. O no se cuenta con el material necesario para que manipule el gripper durante una demostración. Es sencillo y económico imprimir las piezas correspondientes. Mismo caso si para fines didácticos se desea colocar elementos de sujeción de colores, estos pueden ser fabricados por Impresión 3D. Algo mucho más barato que fabricar las piezas en aluminio y anodizarlas.
Grippers Flexibles
Las últimas tendencias en grippers se dirigen hacia métodos de sujeción similares a los dedos humanos. Es decir, en lugar de dedos rígidos se pretende usar dedos articulados. Esto es particularmente complicado de lograr dado que el gripper debe aportar la menor cantidad de peso posible a la aplicación. Además los actuadores para las articulaciones pueden ocupar demasiado espacio.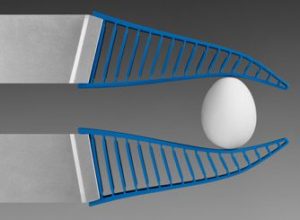
La solución a esos problemas ha sido crear con materiales flexibles formas que se doblan como tentáculos de pulpo. Al principio se hacía de forma mecánica. Posteriormente se idearon diseños para que una sola pieza de material flexible pudiera tener ese comportamiento de sujeción, únicamente actuándolo en dos posiciones.
Esto implica que las mismas operaciones de abrir y cerrar pueden permitir sujetar objetos de diversas formas y diámetros. Y al ser materiales flexibles, estos se adaptan mejor a la forma del objeto y por tanto aumenta la superficie de contacto.
La fabricación de este tipo de grippers se volvió mucho más sencilla con la introducción de materiales flexibles en la impresión 3D. Materiales que no requieren un proceso de vulcanizado, polimerización, curado o en general cualquier proceso químico. Simplemente son calentados y depositada capa por capa hasta formar la pieza deseada. El resultado final es una pieza flexible. Con un bajo costo de tiempo y de producción.
Contáctanos a través de la página de contacto o envía un correo a contacto@dachssolutions.com y te apoyaremos con la fabricación o diseño de los grippers que tu aplicación requiera.