Efector final y Muñeca
Las articulaciones del robot que se encuentran entre el brazo y el efector final son llamadas muñeca. En la mayoría de los casos las articulaciones utilizadas en la muñeca son de revoluta. Cada vez es más común diseñar manipuladores con muñecas esféricas. Lo que implica que los ejes de cada articulación de la muñeca se cruzan en un punto común. Conocido como punto central de la muñeca.
Este tipo de diseño es matemáticamente sencillo. Porque permite analizar la posición y orientación del efector final del robot de forma independiente.
Normalmente un robot tiene tres grados de libertad para la posición. Los cuales se generan por tres o más articulaciones en el brazo. De manera que el número de grados de libertad para la orientación depende de los grados de libertad de la muñeca. Dependiendo de las aplicaciones para las que sea diseñado el robot, la muñeca puede tener uno, dos o tres grados de libertad.
La unión de ambas cadenas cinemáticas, la de posición y la de orientación, sirven para darle al robot su utilidad. Es decir, posicionar el efector final con las herramientas que se requieran. Hay que tener presente que es el efector final el que realmente realiza la tarea.

El tipo más común de efector final es un elemento de agarre de tipo pinza. Frecuentemente llamado “gripper”. El cuál, normalmente solo tiene dos estados: Abierto y Cerrado. Esto puede ser adecuado para aplicaciones de transferencia de materiales, manejo de partes o tomar herramientas simples. Sin embargo, no resulta útil para otras tareas como ensamble, soldadura o maquinado. Es por ello que constantemente se están desarrollando nuevas tecnologías y métodos que permitan crear efectores finales capaces de realizar diversas tareas.
¿Qué es un efector final?
Un efector final es cualquier objeto unido al final de la cadena cinemática de un robot. En el caso de un brazo, al final del último eslabón. En el caso de un robot paralelo, como los robots Delta, el punto donde se unen todos los eslabones. El efector final siempre tiene un propósito específico. Esto incluye pinza, cambiadores de herramientas, sensores de colisión, herramientas de sujeción, pistolas de pintura, herramientas de desbarbado, pistolas de soldadura por arco, etc.
El efector final de un robot recibe diversos nombres comerciales como: accesorio, herramientas del robot, herramientas de fin de brazo (EOA) o dispositivos de final de brazo.
En el área de la investigación, trabajar en el diseño de un efector final es una gran área de oportunidad. Debido a que frecuentemente se requiere que los efectores finales tengan características muy especificas. Las cuáles no siempre cumplen los productos comerciales.
De igual manera, existen muchas investigaciones que se enfocan en diseñar un efector final antropomórfico. Es decir, un efector final que tenga la forma de una mano humana y por supuesto, tenga la misma destreza.
Intercambiadores de herramienta
Cómo se dijo anteriormente, un robot puede ser utilizado en diversos tipos de tareas. Cada una con especificaciones distintas. Un solo efector final difícilmente podría cumplir con todos los requerimientos.
Es por ello que existen los intercambiadores de herramientas.
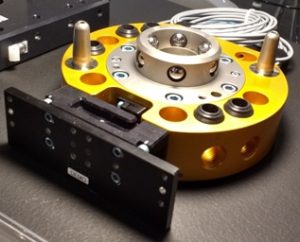
Un intercambiador de herramienta es un efector final dividido en dos partes. Una se ensambla en el robot y la otra en la herramienta. Ambas partes de este tipo de efector final están diseñadas para asegurarse de forma automática. Así como soportar cargas específicas dependiendo del propósito de la herramienta sin desensamblarse. Por lo general se utilizan elementos neumáticos para el sistema de bloqueo que asegura ambas piezas.
Las piezas ensamblan perfectamente permitiendo el paso de señales eléctricas, neumáticas e hidráulicas. Un intercambiador de herramienta provee de una gran flexibilidad. Permitiendo cambiar de herramientas de acuerdo a las necesidades del proceso. O incluso cambiar completamente de proceso.
Los intercambiadores de herramientas reciben diversos nombres como dispositivo de cambio rápido (Quick-Change device, abreviado como QC) o cambiador de herramienta automático (Automatic Tool Changer, abreviado como ATC).
Conexión de Sensores
Los intercambiadores de herramienta actuales permiten que las herramientas que se conecten al efector final del robot cuenten con un gran número de sensores. La instrumentación de las herramientas es crucial para optimizar la operación, mantenimiento y monitoreo del efector final. Desde asegurar que la pieza o material a manipular está presente y sujeta, hasta contar el número de ciclos que ha operado esa herramienta en particular.
Lo anterior puede realizarse pasando señal por señal a través del intercambiador de herramienta o usando un protocolo de comunicación en el efector final.
Comuníquese con nosotros en nuestra página de CONTACTO o enviando un correo a contacto@dachssolutions.com y con gusto lo guiaremos en el proceso de encontrar soluciones en efectores finales y cambiadores de herramientas.
Si te interesa saber más sobre el tema déjanos tus comentarios abajo o a través de Facebook en /dachssolutions
Si requieres, consultoría, cotización o servicio haz clic AQUÍ.
Construyamos Soluciones Juntos